
Servomoteurs
Un servomoteur se compose d’un moteur fixe avec des enroulements de stator et d’un rotor rotatif rotatif qui comprend des aimants permanents. Le flux magnétique créé par le courant traversant les enroulements du stator fait tourner le rotor. Cela est dû à la distribution du champ magnétique. Un servomoteur est moins puissant qu’un moteur pas à pas car il a moins de pôles. Un servomoteur doit fonctionner dans un système en boucle fermée.
Le diamètre d’un servomoteur est généralement compris entre NEMA (17 et 200) mm. Il peut produire 76,2 m-livres de couple.
Un servomoteur peut fournir une accélération plus élevée qu’un moteur pas à pas en raison de sa combinaison de vitesse et de couple. Un servomoteur assure également un meilleur positionnement et un meilleur contrôle dans les opérations en boucle fermée.
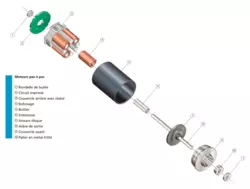
Moteur Pas à Pas
Un moteur pas à pas est composé d’un stator fixe avec des bobinages et d’un rotor avec des aimants permanents. Le stator crée une distribution de flux magnétique qui interagit avec le champ magnétique généré par le champ magnétique du rotor, entraînant un effet de rotation lorsque le courant passe à travers les enroulements. Les moteurs pas à pas ont généralement 50 paires de pôles ou plus. Chaque pôle est alimenté par le conducteur dans un ordre séquentiel. Cela garantit que le rotor se déplace de manière cohérente (en raison de son nombre élevé de pôles).
Étant donné que la plupart des applications de moteurs pas à pas se situent dans la plage de tailles de moteurs NEMA (17-23), ils sont généralement disponibles dans des châssis plus petits. Il est rare de trouver un stepper capable de produire un couple supérieur à (1 000-2 000) onces pouces.
Servomoteur Contre Moteur Pas à Pas Pour Les Applications De Contrôle De Mouvement
La principale différence entre les moteurs est leur nombre total de pôles. Un servomoteur peut avoir de 2 à 7 paires de pôles, alors qu’un moteur pas à pas peut avoir de 25 à 50 pôles.
Un servomoteur nécessite un encodeur pour contrôler la position via le réglage des impulsions en raison de la différence de nombre de pôles. Un moteur pas à pas, en revanche, se déplace de manière incrémentielle avec une impulsion continue dans un système en boucle fermée.
Contrôle Moteur : Les Avantages Et Les Inconvénients
Servomoteurs
Avantages : les servomoteurs fournissent des couples élevés à des vitesses élevées, ce qu’un moteur pas à pas ne peut pas faire. Un servomoteur fonctionne avec un rendement compris entre (80 et 90%)%. Il est capable de fonctionner avec des variateurs AC et DC et n’est pas affecté par les vibrations ou les résonances.
Inconvénients : Bien que les servomoteurs présentent de nombreux avantages, leur coût présente des inconvénients majeurs. Un servomoteur est plus cher qu’un stepper. L’ensemble du système est plus cher en raison du surcoût d’un encodeur et d’un réducteur. Le système moteur est également plus complexe en raison de la nécessité des deux composants, ce qui entraîne des coûts de maintenance plus élevés et, par conséquent, des dépenses plus élevées.
Moteurs Pas à Pas
Avantages : Le nombre plus élevé de pôles dans un moteur pas à pas garantit que les applications de contrôle de mouvement peuvent être contrôlées avec précision. Ce moteur produit un couple élevé à basse vitesse. Ces moteurs sont abordables et facilement disponibles sur le marché.
Inconvénients : il y a certaines limites à
un moteur pas à pas. Lorsque le moteur est utilisé à des vitesses élevées, il perd environ 80 % de son couple. Ils produisent des niveaux de vibration plus élevés et sont plus sensibles aux problèmes de résonance. Les moteurs pas à pas peuvent également produire des niveaux élevés de chaleur, ce qui peut causer des problèmes dans certaines applications.
Chaque type de moteur a ses propres avantages et inconvénients. Savoir lequel vous convient le mieux peut vous aider à déterminer quel moteur convient le mieux à votre application.
Comment Choisir Le Bon Moteur
- Budget
- Inertie et masse de charge
- Exigences de vitesse
- Exigences de couple
- Accélération favorable
- Limites de taille
Les performances d’un servomoteur sont incontestées. Un moteur pas à pas, cependant, est plus compétitif que le servo en termes de répétabilité. La masse-ressort d’un moteur pas à pas peut entraîner une perte de quelques pas. Le variateur dirige le stepper dans une direction angulaire afin que les pas perdus ne soient pas reportés d’une rotation à l’autre. Cependant, il a une répétabilité élevée.
Finale : Laquelle Est La Meilleure ?
Après toutes les considérations ci-dessus, le dernier facteur qui distinguera un servomoteur et un moteur pas à pas est leur coût. Un moteur pas à pas est le meilleur choix si vous avez un budget limité. Le moteur pas à pas utilise des aimants bon marché et nécessite rarement une boîte de vitesses.
Les moteurs à nombre de pôles élevé et à couple élevé à basse vitesse, ainsi qu’une faible consommation d’énergie en font un excellent choix à faible coût. Il est également compact et peut être utilisé dans les secteurs de la biotechnologie, de la médecine et de la fabrication de semi-conducteurs, ainsi que dans la sécurité et la défense.
Si le coût n’est pas un problème et que vous avez des exigences principales en termes de précision, de vitesse et d’accélération, un servomoteur peut être le bon choix. Un servomoteur est bien adapté aux systèmes de traitement, de conversion et d’emballage de bandes, ainsi qu’à d’autres applications similaires. Si la performance est votre objectif principal, vous devriez envisager un servomoteur.


